


机器人能否像人类一样感知时间?新研究使用强化学习赋予时间感知
大数据文摘专栏作品
作者:Christopher Dossman
编译:VICKY、Joey、云舟
大家好,本周的AI Scholar Weekly栏目又和大家见面啦!
AI ScholarWeekly是AI领域的学术专栏,致力于为你带来最新潮、最全面、最深度的AI学术概览,一网打尽每周AI学术的前沿资讯。
每周更新,做AI科研,每周从这一篇开始就够啦!
本周关键词:视频理解、时间感知、BERT
本周最佳学术研究
在本文中,研究人员通过结合知识和视频问答,提出了一种新的视频理解任务。
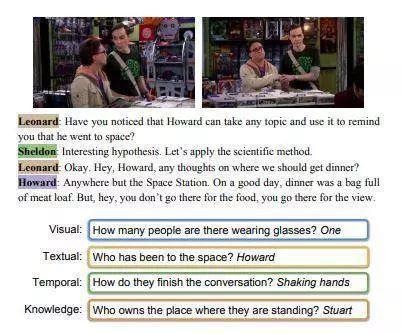
首先,他们提出了一个称之为KnowIT(knowledge informated temporal)VQA的视频数据集。该数据集源自电视剧生活大爆炸(The Big Bang Theory),其中包含了众多知识问答。KnowIT拥有24000多个人工生成的问答对,并将视觉、文本和时间与基于知识的问题相结合。其次,他们提出了一个视频理解模型,将视频的视觉和文本内容与特定的节目知识结合起来。
他们发现:
知识的结合为视频中的VQA带来了显著改进;KnowIT VQA的性能仍然落后于人类的准确性,这表明它对于研究当前视频建模的局限性是有所帮助的。
他们的工作表明了基于知识的模型在视频理解问题中的巨大潜力,这些模型将会为将自然语言处理(NLP)和图像理解的进步结合发挥重大作用。
该框架证明,视频理解和基于知识的推理都是回答问题所必需的。它能够检索并融合语言和视频的时空域,以便对问题进行推理,从而来预测正确答案。
但相比于人类的表现,(该框架)仍存在着很大差距。研究人员希望该数据集将有助于在该领域开发更鲁棒的模型。
原文:https://arxiv.org/abs/1910.10706v3 用强化学习教机器人感知时间
众所周知,人类和动物的大脑具有负责时间认知的不同区域,而机器人则根据将时间视为外部实体(例如时钟)的算法来执行任务。是否有可能从生物学上激发时间感知机制,并在机器人中重现它们呢?
在这项工作中,研究人员观察了大脑用来负责时间感知的计时机制。他们利用贝叶斯推断得出的结果来预估数据的时间流逝,并利用TD学习特征表示来训练代理成功完成与时间相关的任务。由于选择了代表时间的特征,他们表明,在这种情况下,他们能够为代理提供一种类似人类和动物所经历的时间流失的感知。
本文的主要贡献:
提出了一种从机器人传感器收集环境数据的建模方法;在特定假设下,可以从数据中获得正确的时间估算;成功将时间认知机制应用于强化学习问题当中;赋予机器人在与时间有关的任务中复制动物行为的能力。
这项工作提出了一种为代理提供时间认知的过程。对机器人来说,对于时间的感知能够让它们像人类一样,在不同的环境和人物中学习适应对话。该框架已被提议在未来在真正的机器人中实现。